
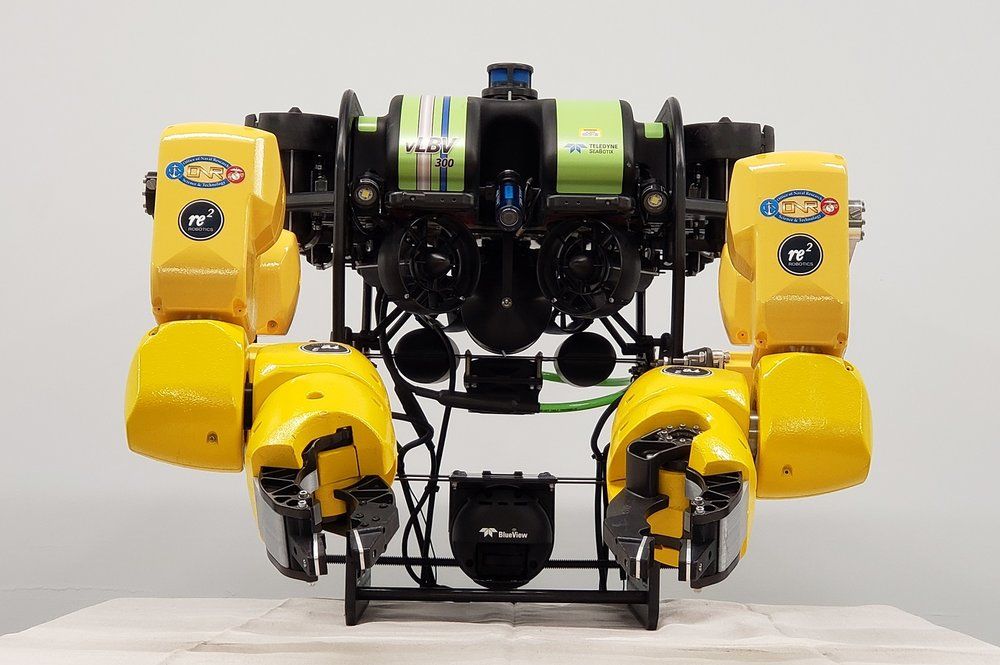
Above image: Dexterous underwater robot developed by RE2 Robotics for handling dangerous devices. (RE2 Robotics.)
UCLA MAE Associate Professor Veronica Santos, along with her University of Washington ME collaborator Professor Jonathan Posner, was awarded part of $3M in Office of Naval Research (ONR) funding to marinize their multimodal tactile sensor skin for robust use on underwater robot grippers. The skin senses normal force, 2D shear force, and vibration. UCLA’s award amount for the baseline 3 year project is $547,022.
This is part of RE2 Robotics’ $3M award from ONR to develop a dexterous, underwater robotic hand with tactile feedback. The program, called “Strong Tactile mARitime hand for Feeling, Inspecting, Sensing and Handing (STARFISH),” will create an advanced end-effector for mine countermeasures (MCM) and explosive ordnance disposal (EOD) missions for U.S. Naval expeditionary forces.
Using next-generation tactile sensing technology and a multi-finger, electromechanical design, STARFISH will allow operators to locate, identify and neutralize hidden and visible explosive threats on land and underwater. STARFISH-enabled manipulators will be deployed on both ground-base and underwater robotic system to defeat explosive threats.
RE2 will work with Professors Santos and Posner to develop the hand, which will use state-of-the-art tactile skin and sensorized fingertips that are capable of sensing normal and shear forces. Operators will command the hand using information provided by external sensing, such as cameras, sonar or LIDAR, which will then be processed with machine-learning algorithms to assist the operator in manipulating the object.
Part of this article was excerpted from an RE2 Robotics press release.