
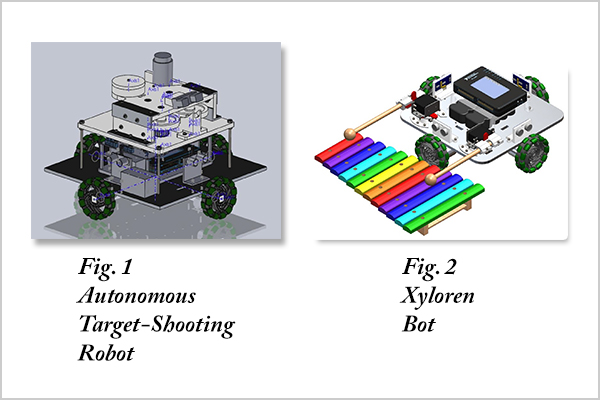
Two MAE student design teams have secured spots as finalists in the 2018 ASME/SME Student Manufacturing Design Competition (SMDC), held on June 19, 2018, at Texas A&M University, College Station, Texas. Considering there are only eight finalists in total, this is quite an achievement. The purpose of the competition is to “foster interest in manufacturing, provide the manufacturing engineering community with fresh new perspectives on design, and create a forum for students to share their new and innovative ideas.” The two finalist projects are the “Autonomous Projectile-Launching Robot” and the “XyloRen Bot,” both described below.
AUTONOMOUS PROJECTILE-LAUNCHING ROBOT
Team members: Jennifer Elliott, Rachel Bax, Zachary Gateley, and Gabriela Moreno Lopez.
OVERVIEW
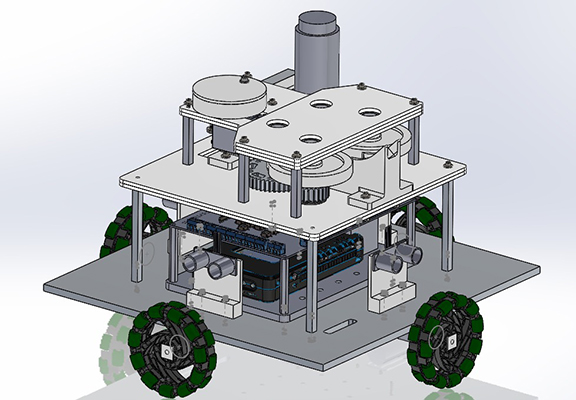
The robot will utilize target and location identification tools (ultrasonic and infrared sensors) to produce information for an enclosed controller to process. This controller will then perform target-shooting and obstacle avoidance tasks as it navigates a specified area. The robot is consequently comprised of two major subsystems, the driving system and the shooting system. The driving system will use Omni-Wheels, each with its own motor, to move the robot to a desired location while using an infrared line follower to track its position and ultrasonic sensors to detect and avoid obstacles along the way. The shooting system will use infrared sensing to find the target which we wish to hit and then launch a projectile at said target using two spinning wheels.
ADVANTAGES
Currently, similar target-shooting ground vehicles, such as tanks, must have a human presence on-board. This on-board operator is tasked with tracking the position of the vehicle and steering it. In this way, our combative robot is a better device because it does not require a human controller (it is autonomous), and it will trace its own position, sense targets, and re-orient itself for optimal shooting. Because our robot does not require a human operator to intervene, it has the potential to save human lives in combat scenarios (when produced at a larger scale). Furthermore, it will have move maneuverability. Instead of using a “tank tread” which stifles lateral movement, our device will have omni-directional wheels, so it can easily change direction to maneuver around obstacles. Altogether, this device is expected to be better than current ground vehicles designed to launch projectiles in that it navigates and operates autonomously, and that it is more easily able to change directions in case of obstacles.
XYLOREN BOT
Team Lead: Joslyn Garcia; Mechatronics Engineer: Michelle Kwan; Systems Engineer: Tammy Ngo; Design Engineer: Michael Thornbury; Design Engineer: Melissa Saldivar
SUMMARY
The proper design of an autonomous robot that can educate and entertain children with music is in need. Besides music, such a robot can encourage a programming mindset early on in a child, contributing to the development of creativity and problem-solving skills. A proposed robot concept that can demonstrate how to play the xylophone is presented in this conceptual report. Named XyloRen, this robot’s autonomous nature enables open-ended possibilities and can extend to other useful tasks in a home, such as multitasking as a vacuum or picking up objects. For consumers, an investment is addressed for both parent productivity and their children’s education.
OVERVIEW
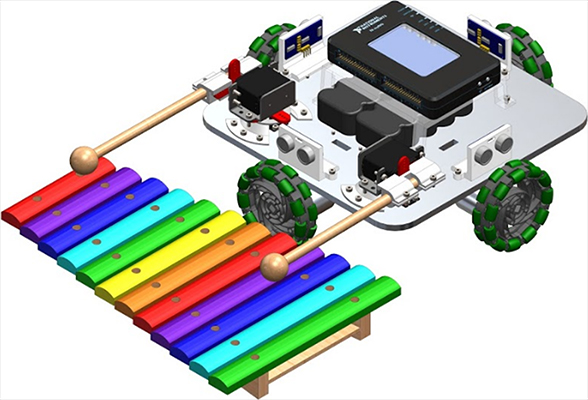
The XyloRen Bot has five subsystems: chassis/structure, navigation, power system, drive system, and the arm mechanism. Chassis is made of Aluminum 6061 due to its mechanical advantages, such as being a light weight metal and maintaining good structural strength and toughness.

The navigation system includes 3 ultrasound sensors for detecting obstacles and navigating the robot around them, an IR sensor placed underneath the robot for tracking different colors of tapes used for navigation, a line follower sensor for accurate movement along the tape line, and a microphone for collecting sound feedback from the xylophone.
The power system includes a given battery to power the myRIO and a separate battery (12V, 3Ah) to support all other components. The drive system consists of 4 Omni wheels each connected to an independent DC motor, which then share 2 motor controllers. The arm mechanism has 2 degrees of freedom for each of the 2 arms: vertical and horizontal rotation relative to the xylophone. Each arm requires 2 servos to provide the 2 degrees of freedom, so 4 servos are utilized in total.